
Rehabilitation Robot Manufacturing Gait Rehabilitation Trainer
- $250000.00 /set
- 1 set
- Zhengzhou Gold Elite Industry Co., Ltd.
- Henan, China
- Mr Gold Elite GE
| MOQ: | 1 set | application: | Rehabilitation Center |
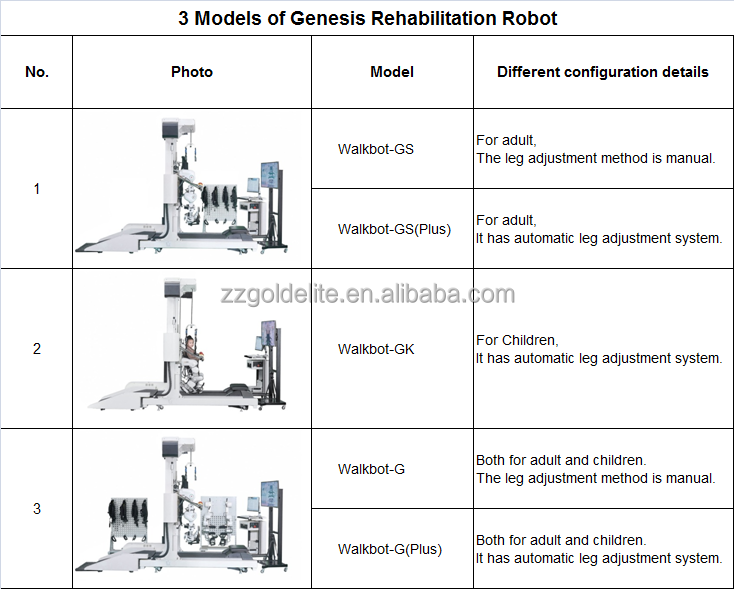
| model: | Walkbot-GS, Walkbot-GK, Walkbot-G | payment terms: | L/C, T/T |
| type: | training equipment | Material: | Stainless steel |
| product name: | Lower Limb Rehabilitation Robot | power supply: | 220V, 50HZ |
| usage: | For walking recovery in stroke, SCI, MS, TBI, PD patients | Warranty: | 1 year |
| port: | Qingdao, Shanghai, Guangzhou | system: | smart system |
| Instrument classification: | Secondary | Packaging Details: | The machine will be packed in wooden case. |
| Supply capacity: | 50 sets per month | Certificate: | CE/ISO13485 |
| Origin: | Henan, China | Package preview: | |
| feature: | Three-joint drive: hip, knee, ankle | After-sales service: | online technical support |
| Function: | walking gait recovery | brand: | Genesis |
Rehabilitation Robot Manufacturing Gait Rehabilitation Trainer
introduce
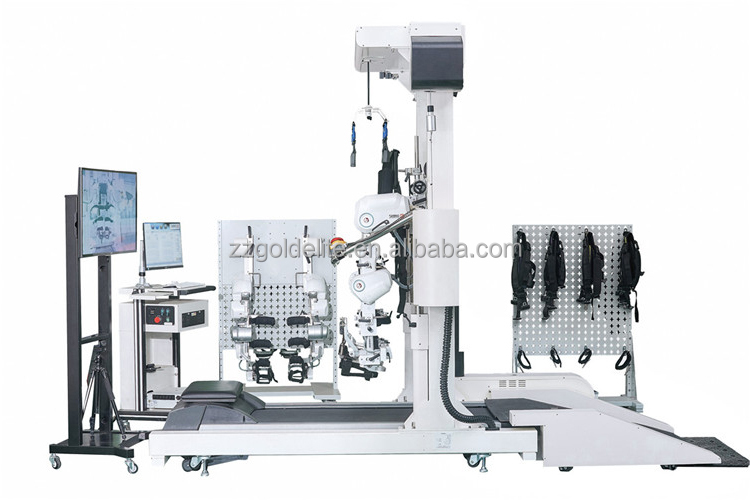
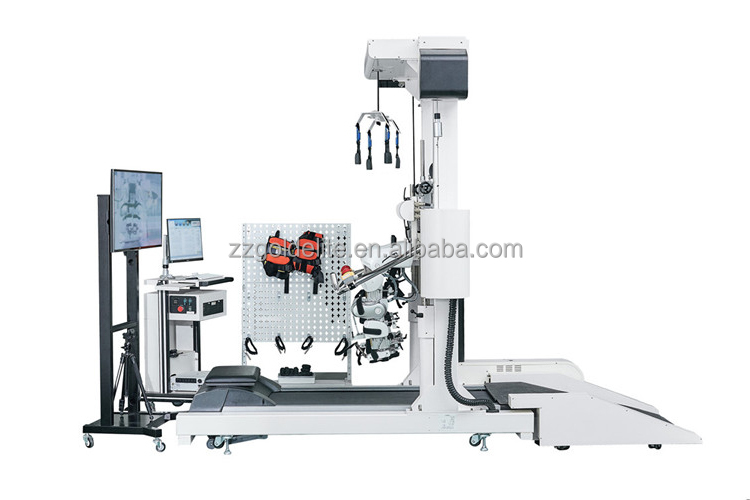
Genesis Walkbot is a three-joint automatic lower limb exoskeleton rehabilitation robot independently developed and designed by our company. With the original hip joint, knee joint and ankle joint driving device, it can completely simulate the walking pace of the real human lower limbs, and train and exercise the muscles of the lower limbs. Finally, the control ability of the nervous system to the walking function is restored, and the purpose of restoring the walking function is achieved.
This product has a unique ankle joint drive device, which solves the shortcomings of previous lower limb rehabilitation robots that can only train hip joints and knee joints, but cannot train ankle joints. It pioneered the complete gait active and passive training of hip, knee and ankle joint linkage, and is in the leading position in the entire medical industry.
application
This walking robot can be used in hospitals, clinics, rehabilitation centers.



Indications
Stroke, Cerebral Palsy, Traumatic Brain Injury, Parkinson's Disease, Spinal Cord Injury, Multiple Sclerosis, Disuse Myasthenia, Spinal Muscular Atrophy,
Degenerative joint diseases of lower extremities such as osteoarthritis after prosthetic replacement such as total joint replacement.
Contraindications
1. Spinal instability;
2. Unhealed lower limb fractures without internal fixation;
3. The patient cannot actively cooperate;
4. Excessive muscle spasm during exercise;
5. Orthostatic hypotension;
6. Severe osteoporosis;
7. Mental disorders;
8. Unstable vital signs;
9. Patients with damaged skin on the articular surface;
10. Patients with bone and joint tumors and rehabilitation physicians think that rehabilitation training is not suitable.
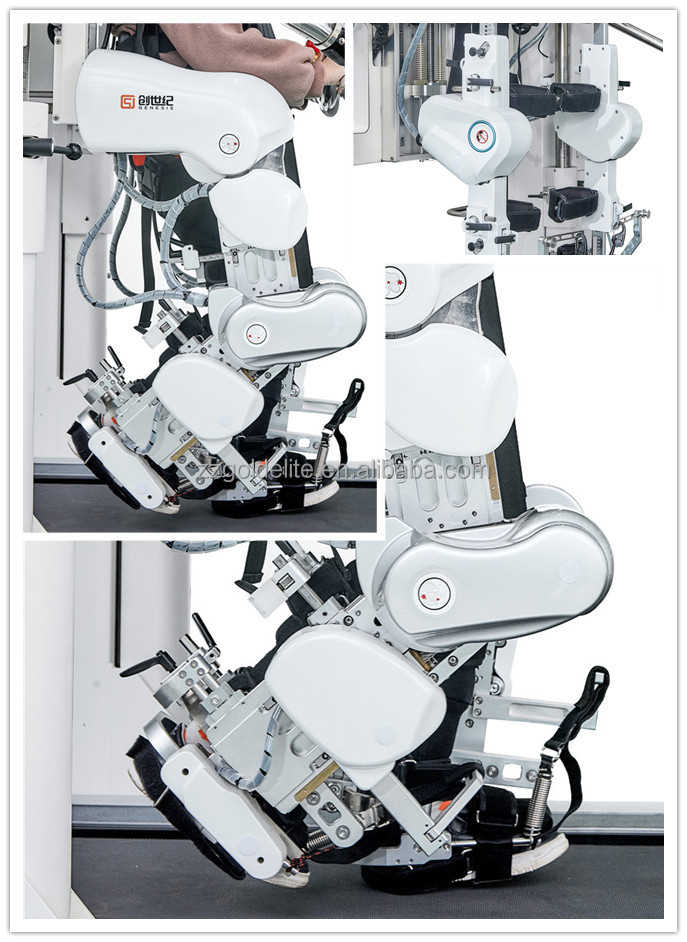
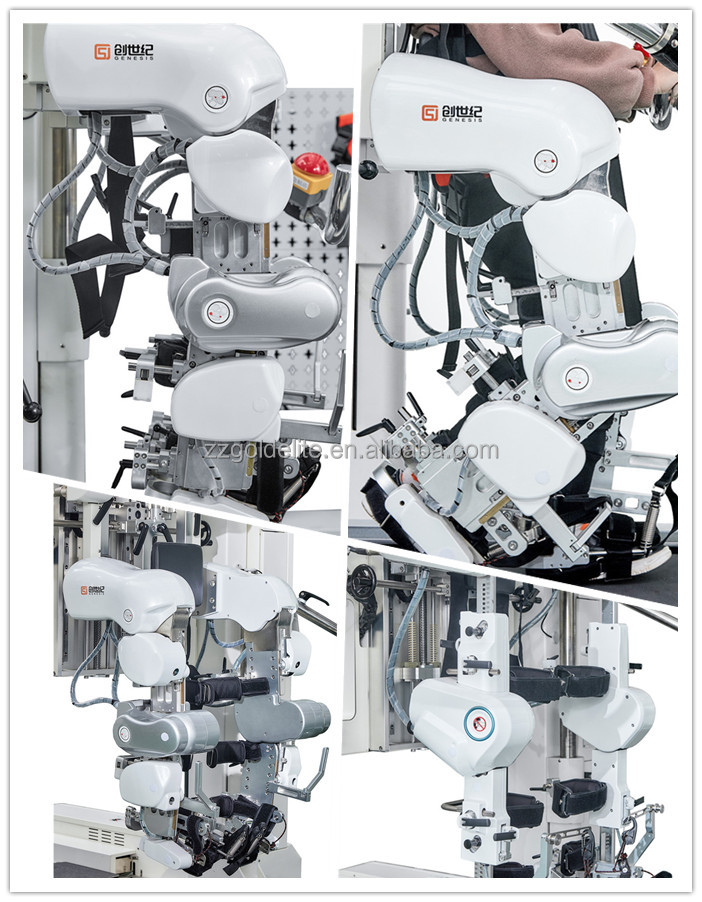

1. The world's first ankle drive
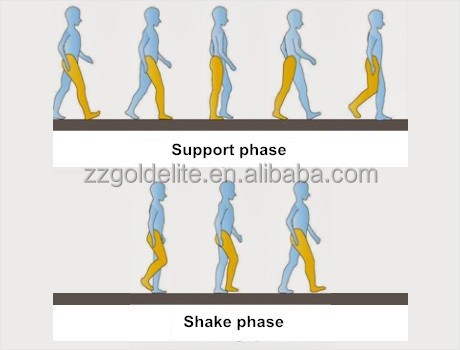
The world's first exoskeleton rehabilitation robot with an ankle joint drive device avoids the shortcomings of previous rehabilitation robots that can only fix the hip and knee joints and cannot train the ankle joint. Same gait pattern as normal.

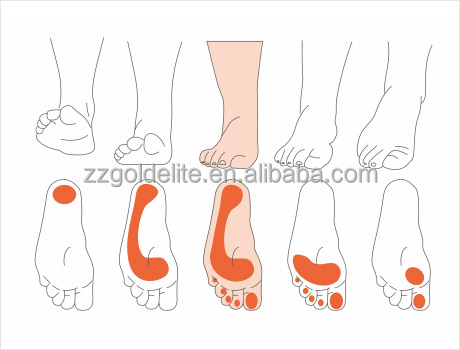
From the perspective of rehabilitation, the movements to be trained should be commonly used in life to help patients establish correct movement patterns.
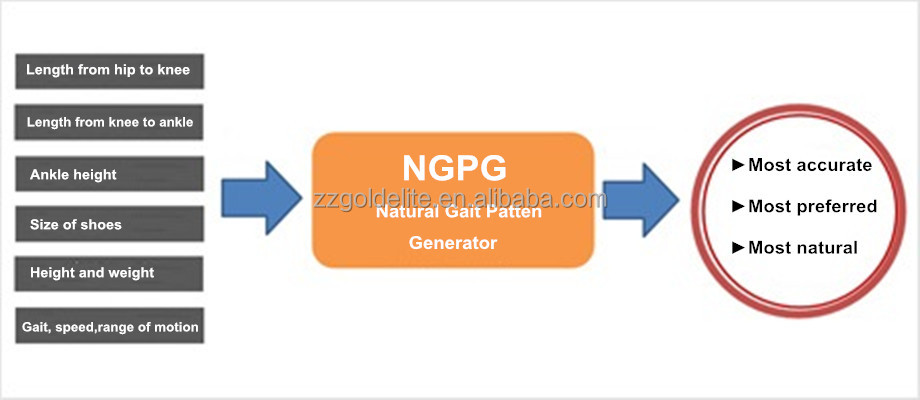
Walkbot uses an electric drive device in the ankle joint, and the three joints of the hip, knee, and ankle cooperate with the gait to achieve the most natural gait that is closest to the actual gait.
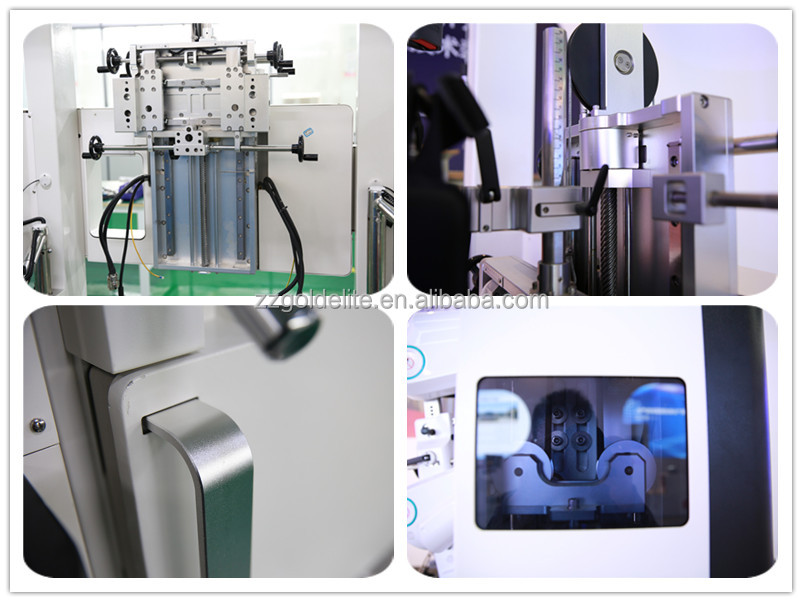
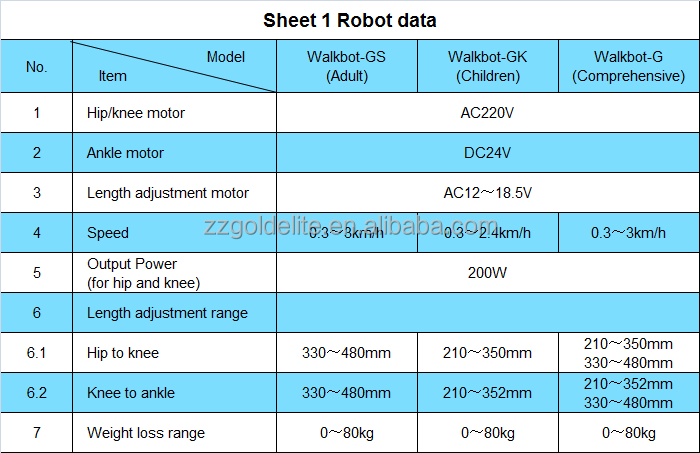
2. The world's first automatic joint length adjustment system
The length adjustment of the hip-knee joint and knee-ankle joint is accurate from 1cm to 1mm, which is convenient for children and patients to set more accurate training parameters, and achieve accurate evaluation, accurate feedback, and accurate training.

The preparation time before training can be shortened by more than 5 minutes.
Accurate human joint angle model settings can help patients establish a more natural movement pattern and a gait posture closer to the real gait.
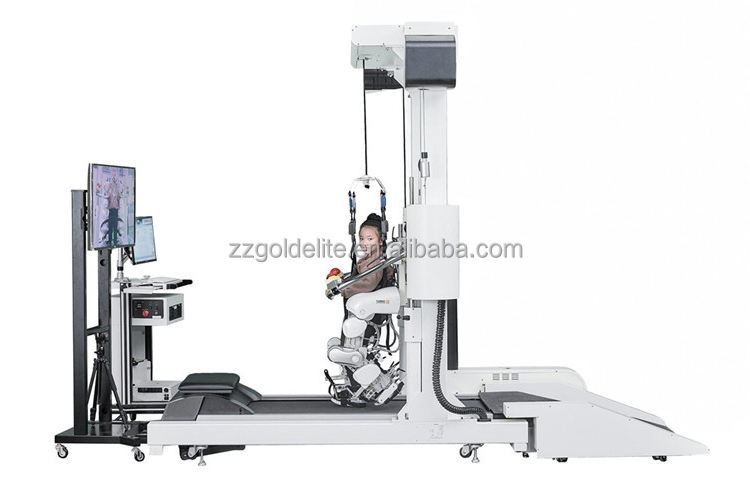
3. Human-computer interaction between patients and robots
Genesis Walkbot provides an intelligent and interactive training mode based on continuous training data of patients.
It can automatically adjust the patient's spasticity or stiffness, assist resistance, pace speed and other parameters, combined with the dynamics and kinematics of the hip, knee and ankle joints, to achieve the perfect fusion of real man-machine integration.
Before training, a doctor or therapist sets a target pace, target intensity, and task intensity.
In the process of patience training, when the cumulative strength of completing the task exceeds the original target strength value, the robot's pace increases by 0.1km/h, otherwise it slows down by 0.1km/h until it reaches the target pace.

4. Metronome function
Auditory feedback (metronome function)
Metronome is an auxiliary function that produces a steady beat at different speeds
In each gait cycle, stimulate the patient's hearing by making interesting sounds, cultivate the patient's walking rhythm, and increase the stability of walking
In order to increase the patient's awareness of active rehabilitation, when force is required, a sound prompt will be issued
Can perform single or double leg training, select the timing of the sound
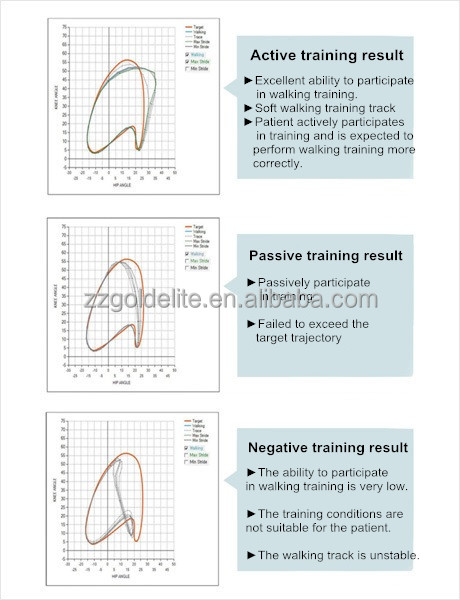
5. Three-dimensional robot gait training analysis system
The Genesis Walkbot visually 3D and graphically reproduces the patient's walking motion based on the robot's walking training data.
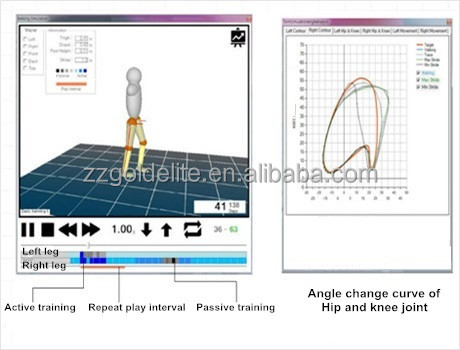
Viewpoint transformation (front/back/left/right) and specific parts can be played repeatedly, providing real-time analysis chart function, which can pass normal gait trajectory chart, hip/knee joint angle chart, ankle joint position chart gait.
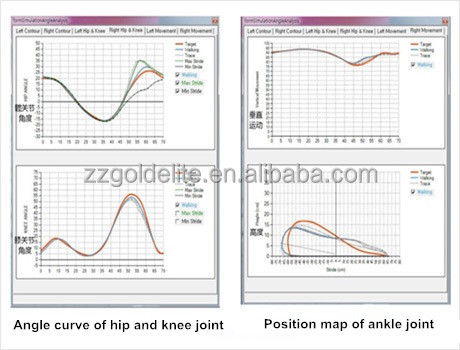
After the robot walks training, not only can it analyze its own walking pattern, but also can confirm the degree of improvement in walking.
| No. | thing | date |
| 1 | main features | Three-joint drive: hip, knee, ankle |
| 2 | application | rehabilitation center, hospital |
| 3 | Function | Help the patient regain a walking gait |
| 4 | usage | For walking recovery in stroke, SCI, MS, TBI, PD patients |
| 5 | power supply | 220V, 50HZ |
| 6 | Output Power |
200W |





Other Products
-
 2022 best selling colon cleansing machine colon hydrotherapy machine colonic machine$5800.00 - $6400.00 / set
2022 best selling colon cleansing machine colon hydrotherapy machine colonic machine$5800.00 - $6400.00 / set