
Komodo-11 0.5 ton electric all terrain rubber crawler mini excavator crawler chassis with suspension system
- $46000.00 /set
- 1 set
- Shanghai Zosn Hydraulic Co., Ltd.
- Shanghai, China
- Ms Zary Zhao
PRODUCT DETAIL
| Maximum obstacle crossing: | 300mm | place of origin; place of origin: | China |
| Weight (kg): | 720 | Showroom location: | not any |
| Marketing Type: | normal product | Surface treatment: | black sandblasted |
| Warranty: | 1 year | Intellectual Property Code: | IP64 |
| Applicable industries: | Building Materials Stores, Mechanical Repair Stores, Manufacturing Plants, Food and Beverage Plants, Construction Engineering, Energy and Mining | Supply capacity: | 100 sets per month |
| Packaging Details: | tray | damping: | Christie*6 hydraulic damping |
| Core components: | motor | Core Components Warranty: | 1 year |
| Self-weight: | 720kg | brand: | ZOSN |
| payment terms: | wire transfer | size: | 1890*1660*900mm |
| Maximum payload: | 500kg | Video external inspection: | if |
| Body material: | 304SS/Alloy/Aluminum | speed: | 0~15km/h |
| battery voltage: | 96V | Health status: | new |
| port: | Shanghai | Mechanical test report: | if |
detailed picture





Product Description
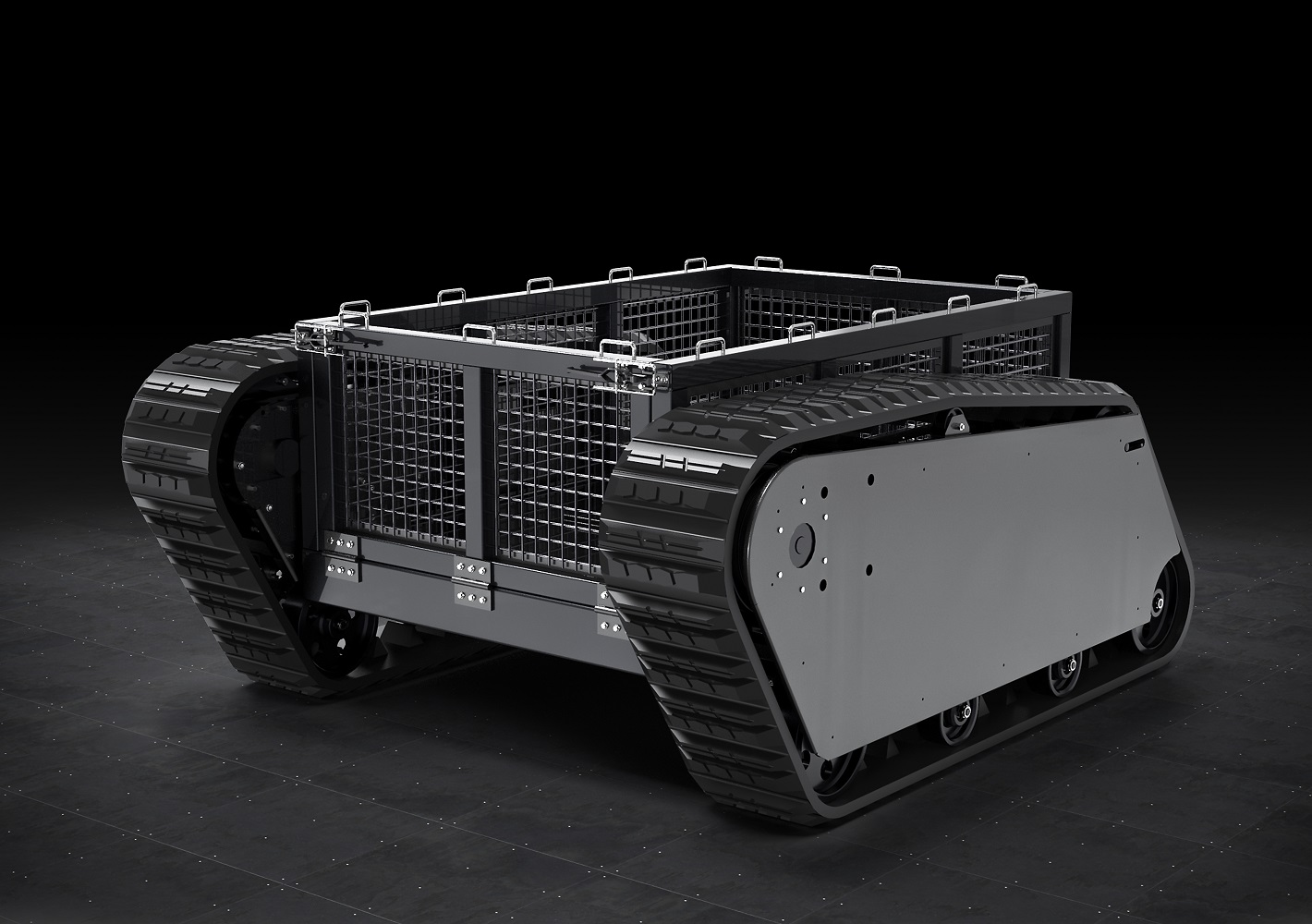
KOMODO-11 Heavy Duty Medium Rubber Track Robot Chassis
Broadcasting platform, reconnaissance and search platform, EOD platform, UAV carrier platform, hoisting transportation platform, etc.
thing | KOMODO-10L | thing | KOMODO-10L |
size | 1890*1660*900mm | running speed | 0~15KM/H |
dead weight | 720KG | surface treatment | black blast |
main ingredient | 304SS / Alloy / Aluminum | intellectual property code | IP64 |
Ground clearance | 250mm | specified load | 500KG |
motor | 96V | maximum payload | 600KG |
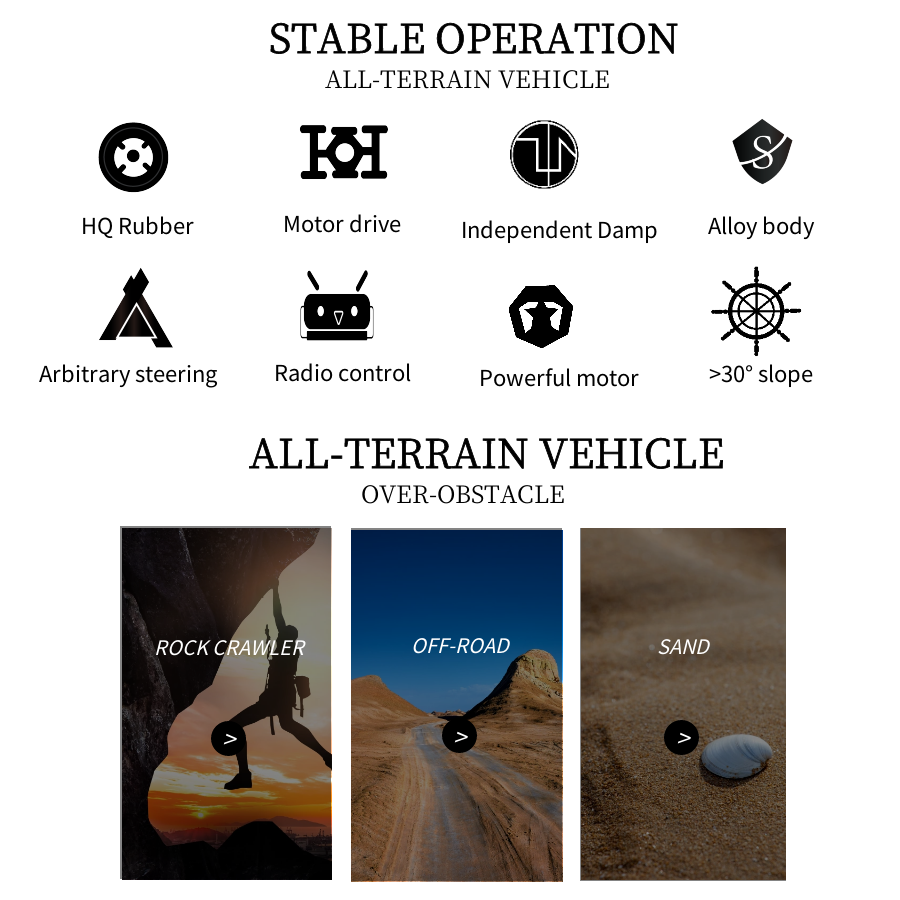
max obstacle | 300mm | max climb | 30° |
damping | Christie*6 hydraulic damping | track width | 280mm |
Configuration list
product | quantity | product | quantity |
Robot chassis | 1 | RC Controller and Receiver | 1 |
control driver | 1 | Robot Antenna | 1 |
lithium battery | 1 | charger | 1 |
paper instructions | 1 | toolbox | 1 |
Custom options
can be customizedcolor and widthbased on customer's needs.
Model selection

Brushless DC Variable Speed Motor Driver
Model | BLSD4875DC-2Q-H |
work pressure | 37~55 |
Operating temperature | -10~+45 |
Peak current A | 37.5~75 |
Continuous current A | 18.75~37.5 |
Hall sensor Nm | 60/120 electric angle |
Rated Current Amps | 19.5 |
Frequency PWM kHZ | 15 |
PI speed | closed loop regulation |
RC speed command speed/s | 0.1~10 |
Moment of inertia Kg·mm2 | 320 |
Speed command voltage range V | 0-5 |
PG speed pulse output mm | 24 pulses @ 8 poles |
feature:
Undervoltage and overvoltage protection, alarm diagnostic output, switchable current loop speed, parameter setting with switch and potentiometer, short circuit/over temperature protection, safe commutation, safe start, radiator.
notes:
1) The winding wire may interfere with the hall signal, so the hall wire should be separated from the winding wire, and the two cannot be wound together. Interference may cause the drive to work abnormally. When the connection wire between the motor and the driver is too long (over 500mm), the shield wire should separate the winding wire from the Hall wire.
2) The user power supply should meet the peak current load from no load to 80%; the voltage must be within the specified range.
3) In order to ensure the normal operation of the driver, the insulation resistance of the Hall wire and the motor winding wire and the Hall wire winding wire and the chassis is greater than 100 megohms (500VDC), and can accept 600VAC/50Hz/1mA/1s pressure without breakdown.
2) The user power supply should meet the peak current load from no load to 80%; the voltage must be within the specified range.
3) In order to ensure the normal operation of the driver, the insulation resistance of the Hall wire and the motor winding wire and the Hall wire winding wire and the chassis is greater than 100 megohms (500VDC), and can accept 600VAC/50Hz/1mA/1s pressure without breakdown.
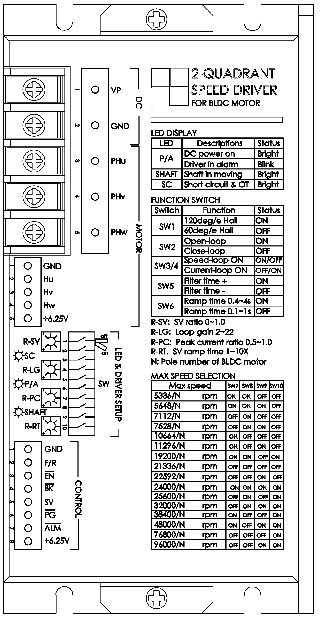
Typical Wiring Diagram
1) Control port
F/R-positive and negative control, positive, low or ground reverse high or no wiring;
EN-enable interface, high level or no connection disabled, low level or ground enable, generally connected to GND;
SV-0~5V speed command voltage (input resistance 112K);
PG-speed pulse output (OC);
* LED light indication
SC-light short circuit, not working properly;
P/A- The indicator light is powered on and flashes to drive the alarm;
SHAFT - turns the motor on and off;
F/R-positive and negative control, positive, low or ground reverse high or no wiring;
EN-enable interface, high level or no connection disabled, low level or ground enable, generally connected to GND;
SV-0~5V speed command voltage (input resistance 112K);
PG-speed pulse output (OC);
* LED light indication
SC-light short circuit, not working properly;
P/A- The indicator light is powered on and flashes to drive the alarm;
SHAFT - turns the motor on and off;
alarm
a. The Hall signal is incorrect; b. Undervoltage or overvoltage;
c. Short circuit or overheating (80 degrees Celsius); d. Continuous overload for 5-6s;
e. The alarm state can be restored to normal by powering off once or clearing it once without reset;
drive settings
R-SV potentiometer is used for SV ratio setting, R-LG potentiometer is used for loop gain setting; R-PC potentiometer is used for peak current ratio setting;
R-RT potentiometer is used for speed command voltage rise time setting.
c. Short circuit or overheating (80 degrees Celsius); d. Continuous overload for 5-6s;
e. The alarm state can be restored to normal by powering off once or clearing it once without reset;
drive settings
R-SV potentiometer is used for SV ratio setting, R-LG potentiometer is used for loop gain setting; R-PC potentiometer is used for peak current ratio setting;
R-RT potentiometer is used for speed command voltage rise time setting.




VIEW MORE
YOU MAY LIKE






